Maîtriser le LiDAR avec DJI Enterprise : guide d’introduction
Déverrouillez la cartographie aérienne et la collecte de données : améliorez vos opérations grâce à la puissance et à la précision de la technologie LiDAR de DJI
Dans le paysage technologique actuel en constante évolution, le LiDAR s’impose comme un outil essentiel pour diverses applications, de la gestion forestière à l’inspection des infrastructures. Plongez dans le monde du LiDAR avec le guide complet de DJI Enterprise. Des principes fondamentaux aux applications concrètes, ce livret fournit aux lecteurs des connaissances essentielles sur la technologie LiDAR et son potentiel de transformation.
Introduction et principes de la technologie LiDAR
Qu’est-ce que le LiDAR?
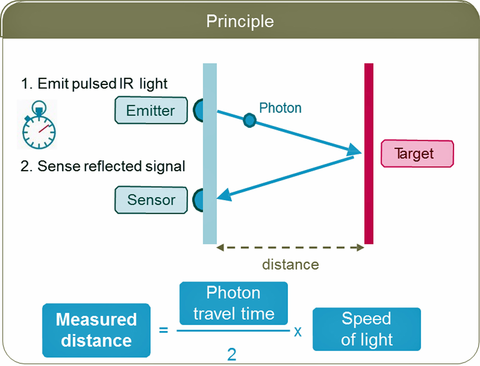
Le LiDAR, qui signifie Light Detection and Ranging, est une technologie de télédétection qui utilise des impulsions laser rapides pour cartographier la surface de la cible. En envoyant un faisceau laser et en mesurant le temps nécessaire à la lumière pour se réfléchir sur les objets, le LiDAR crée des cartes de points tridimensionnelles détaillées.
Imaginez que vous êtes dans une pièce complètement sombre avec une lampe de poche. Si vous pointez la lampe de poche sur divers objets, la lumière rebondira et en voyant cette lumière, vous pouvez avoir une idée de l’endroit où se trouvent les objets et de leur distance. Plus vous faites briller votre lumière et sous différents angles, plus vous aurez une idée précise de la disposition de la pièce. Le LiDAR fonctionne de manière similaire, mais au lieu d’utiliser la lumière visible comme une lampe de poche, il utilise une lumière laser invisible. Voici comment cela fonctionne :
1. Émission: l’appareil LiDAR envoie une impulsion rapide de lumière laser vers un objet.
2. Réflexion: la lumière se réfléchit ensuite sur l’objet et revient au capteur LiDAR.
3. Détection: l’appareil mesure le temps qu’il a fallu à la lumière pour revenir. La vitesse de la lumière étant une constante, cette durée peut être utilisée pour calculer la distance entre le capteur LiDAR et l’objet cible.
LiDAR vs. Photogrammétrie
Le système LiDAR mesure les données, tandis que le système de photogrammétrie les calcule. Cette différence essentielle les rend mieux adaptés à différentes applications. Le LiDAR utilise des impulsions laser pour mesurer la réalité, ce qui le rend idéal pour les applications qui nécessitent une certitude absolue des données. Le LiDAR peut pénétrer la végétation et n’est pas affecté par les conditions d’éclairage, ce qui en fait une excellente option pour cartographier les forêts ou d’autres zones à couverture végétale dense. Le LiDAR est également utile pour créer des modèles de terrain précis et des cartes topographiques.
La photogrammétrie utilise des caméras pour capturer des images superposées d’une zone, qui sont ensuite assemblées pour créer un modèle 3D ou une orthocarte. Elle est moins chère que le LiDAR et peut être utilisée avec du matériel standard comme n’importe quel drone et caméra. Cela la rend utile pour créer des modèles très détaillés de bâtiments et d’infrastructures, ainsi que des orthocartes haute résolution pour les applications d’inspection et de surveillance.
| Aspect | Photogrammétrie | LiDAR |
|---|---|---|
| Définition | Technique permettant d’obtenir des mesures et des modèles 3D à partir de photographies. | Une méthode de télédétection utilisant la lumière laser pour mesurer les distances et générer des modèles 3D précis de la surface de la Terre. |
| Précision | Haute précision dans des conditions bien éclairées et claires après application de GCP sous RTK. | La précision dépend de l’état POS initial et non des conditions d’éclairage. |
| Coût | Généralement moins coûteux, plus abordable pour les projets à petite échelle. | Coût plus élevé en raison d’équipements sophistiqués et d’exigences de traitement. |
| Maniabilité du terrain | Fonctionne bien dans les environnements urbains et les paysages clairs. | Excellent sur divers terrains, y compris la végétation dense et les paysages urbains. |
| Traitement des données | Traitement fastidieux, en particulier pour les grands ensembles de données. | Le traitement est plus rapide car les données sont capturées au format de coordonnées spatiales de manière native. |
| Conditions de luminosité | Nécessite un bon éclairage pour des résultats optimaux. | Efficace dans toutes les conditions d’éclairage, y compris la nuit. |
| Pénétration de la végétation | Lutte contre la végétation dense. | Capable de pénétrer la végétation dense pour atteindre le sol. |
| Dépendance aux conditions météorologiques | Les performances peuvent être affectées par les conditions météorologiques telles que les nuages et la pluie. | Moins affecté par les conditions météorologiques. |
| Résolution spatiale Resolution | Haute résolution spatiale pour les détails de surface. | Résolution spatiale inférieure par rapport à la photogrammétrie. |
| Application | Idéal pour la documentation du patrimoine culturel, la cartographie à petite échelle et l’architecture. | Idéal pour la cartographie topographique à grande échelle, la foresterie et la planification urbaine. |
Quels sont les composants d’un système LiDAR aéroporté intégré ?
Composants matériels
Systèmes LiDAR
- Module LiDAR : Le module laser est le composant le plus important du système LiDAR. Il génère un faisceau laser pulsé qui est dirigé vers la surface cible. Le module laser est composé de plusieurs composants, dont la source de lumière laser, le récepteur, les composants optiques et le contrôleur électronique.
- Source de lumière laser : elle génère de courtes impulsions de lumière laser qui sont utilisées pour mesurer la distance entre le capteur LiDAR et les objets dans l’environnement.
- Récepteur : Il détecte la lumière laser réfléchie et la convertit en un signal électronique qui peut être traité par le système LiDAR.
- Composants optiques : Ces composants sont responsables de la direction et de la focalisation du faisceau laser vers la surface cible et de la collecte de la lumière réfléchie.
- Contrôleur électronique : Il contrôle le timing et la durée des impulsions laser et traite les signaux du récepteur.
- GNSS (Global Navigation Satellite System) est utilisé pour fournir un géoréférencement précis des résultats LiDAR numérisés. La plupart des systèmes LiDAR pour drones utilisent leur propre système GNSS individuel pour enregistrer les données satellites à des fins de géoréférencement et de post-traitement ou sont intégrés à DJI PSDK et utilisent le système GNSS du système du drone.
- L’IMU (unité de mesure inertielle) est un appareil qui mesure l’accélération et la vitesse angulaire d’un système LiDAR. En intégrant ces mesures au fil du temps, l’IMU peut déterminer la position, la vitesse et l’attitude du système LiDAR dans l’espace tridimensionnel. Ces informations sont utilisées pour corriger tout mouvement ou vibration du système LiDAR pendant le processus de collecte de données.
- L’INS (système de navigation inertielle) utilise les données brutes d’une IMU et les intègre pour fournir des informations sur la position, la vitesse et l’orientation d’un objet par rapport à un point de départ, une orientation et une vitesse connus. L’INS prend les données de l’IMU et les intègre aux informations de positionnement GNSS pour fournir une estimation continue de la position et de l’orientation du capteur LiDAR pendant la capture des données.
Systèmes de drones UAV
- Un drone ou véhicule aérien sans pilote est utilisé pour faire voler le système LiDAR au-dessus de la zone étudiée, et il peut être équipé de son propre système GNSS et RTK/PPK pour un géoréférencement précis du système LiDAR.
Composants logiciel
- Le logiciel de planification de mission de vol est utilisé pour planifier la trajectoire de vol d’un drone équipé d’un système LiDAR. Ce logiciel permet à l’utilisateur de définir une zone à surveiller, puis de générer automatiquement un itinéraire de vol basé sur des points de cheminement. L’utilisateur peut ajuster les paramètres du système UAV et les actions des capteurs pour le vol autonome vers les points de cheminement. Le logiciel génère ensuite une trajectoire de vol qui couvre efficacement la zone et collecte les données nécessaires au système LiDAR. Ces données peuvent être utilisées pour créer des cartes ou des modèles 3D détaillés de la zone étudiée.
- Le logiciel de surveillance et de contrôle de vol permet à l’utilisateur de surveiller la trajectoire de vol et l’état du drone et du système LiDAR en temps réel pendant la collecte des données. Le logiciel peut afficher divers paramètres tels que l’altitude, la vitesse et le niveau de la batterie. Ces informations sont cruciales pour garantir la sécurité du drone et collecter des données LiDAR de haute qualité. De plus, le logiciel de surveillance de vol peut alerter l’utilisateur en cas de problème ou de dysfonctionnement pendant le vol.
- Le logiciel de traitement de nuages de points bruts est un logiciel OEM développé par les fabricants de capteurs. Il est utilisé pour traiter les données LiDAR brutes collectées à partir de tous les composants du système et générer les données LiDAR dans un format manipulable tel que LAS/LAZ pour une utilisation ultérieure.
- Les logiciels de traitement de nuages de points font référence aux programmes informatiques conçus pour manipuler et analyser les données de nuages de points. Selon l’application, les logiciels de traitement de nuages de points peuvent être utilisés pour diverses tâches telles que la création de dessins, la réalisation de mesures, l’extraction de surfaces, la classification, etc.
.png?width=715&height=303&name=Untitled%20(1).png)
Terminologies et connaissances clés
Réflectivité de la surface de l’objet
- Différentes surfaces d’objets ont des taux de réflectivité différents
- La plupart des surfaces d’objets ont une réflectivité supérieure à 10 %.
- L’eau est un puissant absorbeur, et un laser LiDAR classique d’une longueur d’onde de 905 nm sera directement absorbé. À moins que le LiDAR ne soit de type bathymétrique et que la longueur d’onde du laser soit plus courte, il ne pénétrera pas l’eau.
Voici quelques exemples de taux de réflectivité de surface :
- Asphalte frais : 4-7%
- Herbe sèche : 15-20 %
- Couvert forestier : 5-20 %
- Béton humide : 30-50%
- Neige : 60-90%
.png?width=643&height=376&name=Untitled%20(2).png)
Nuage de points colorisé par réflectivité de base sur la surface (le rouge est élevé, le bleu est faible)
Méthodes de numérisation LiDAR
En modifiant la méthode de rotation à l’intérieur du capteur LiDAR, le système LiDAR peut réaliser deux modes de balayage mécanique différents : balayage répétitif et balayage non répétitif.
Méthode de balayage répétitif
Le balayage répété ne couvre que le champ de vision horizontal (70,4° x 4,5°).
Avantage : Dans la cartographie mobile, les objets ne sont scannés que pendant une très courte période de temps, car la dérive de précision de la navigation inertielle est très faible sur une courte période de temps, de sorte que le modèle scanné est relativement plus précis.
Inconvénient : Le champ de vision vertical est très petit et il n’y a quasiment aucune information sur la surface verticale. Si des informations sur la surface verticale sont nécessaires, il faut prévoir au moins deux trajectoires de vol pour compenser la perte du champ de vision vertical.
Application : Pour les scénarios avec un terrain relativement doux et des exigences de précision élevées, telles que la mesure du terrain, la génération générale de DEM/DSM.
*Il est recommandé d’utiliser une numérisation répétitive lors des levés topographiques pour garantir la précision du nuage de points.
Animation de balayage répétitif (Vue de haut en bas)
Méthode de balayage non répétitif
Le balayage non répétitif peut couvrir rapidement l’intégralité du champ de vision (70,4° x 77,2°).
Avantages : offre une couverture complète du champ de vision, peut effectuer un balayage vertical et obtient de bonnes informations verticales à partir d’un seul balayage sans définir d’angle de cardan.
Inconvénient : dans la cartographie mobile, les objets sont scannés à différentes positions et à différents moments, en s’appuyant sur une précision de navigation inertielle constante. Si la précision de la navigation inertielle dérive au fil du temps, la précision du modèle diminuera. Cela se traduit par des objets flous ou dupliqués, des nuages de points plus épais et des fils plus épais. Cet effet est particulièrement prononcé dans les scans non répétitifs, qui ont un champ de vision plus large.
Application : Convient aux scénarios avec des exigences de précision relativement faibles, des exigences d’efficacité élevées et des exigences d’informations d’élévation complètes, telles que la modélisation 3D urbaine, la modélisation de structures tridimensionnelles complexes, l’inspection des lignes électriques, la cartographie rapide d’urgence, etc.
*Dans le scénario d’inspection de lignes électriques, si un vol à ligne unique est choisi, il est recommandé d’utiliser la méthode de balayage non répétitif.
Animation de balayage non répétitif (Vue de haut en bas)
Longueur d’onde
Les systèmes LiDAR utilisent des lasers pour émettre des impulsions lumineuses, la longueur d’onde du laser déterminant les caractéristiques de l’impulsion. La longueur d’onde du laser affecte la capacité du système LiDAR à pénétrer divers matériaux et les types de réflexions qu’il peut détecter. Voici deux types courants de LiDAR et leur plage de longueurs d’onde correspondante
- Les systèmes LiDAR dans le proche infrarouge (NIR) utilisent généralement des lasers dont les longueurs d’onde sont comprises entre 800 et 1 000 nanomètres. Les systèmes LiDAR NIR pénètrent mieux la végétation et peuvent détecter plusieurs retours à partir d’une seule impulsion, ce qui les rend idéaux pour les applications forestières. Cependant, ces systèmes LiDAR ne peuvent pas pénétrer l’eau et ne sont pas adaptés aux applications bathymétriques.
- Le LiDAR bathymétrique utilise des longueurs d’onde de lumière plus courtes dans le spectre vert et bleu pour pénétrer l’eau et mesurer la profondeur du fond marin. La lumière laser verte d’une longueur d’onde de 532 nm est la plus couramment utilisée pour le LiDAR bathymétrique car elle pénètre mieux l’eau que les autres longueurs d’onde. La lumière laser bleue d’une longueur d’onde de 445 nm est également utilisée dans certains systèmes LiDAR bathymétriques car elle offre une meilleure pénétration dans des conditions d’eau claire. Les systèmes LiDAR bathymétriques sont utilisés pour des applications telles que la cartographie des fonds marins, la gestion des zones côtières et l’inspection des infrastructures sous-marines.
Portée de détection
La portée de détection fait référence à la distance maximale à laquelle un système LiDAR peut détecter et mesurer avec précision des objets. Plusieurs facteurs affectent la portée de détection d’un système LiDAR, notamment la puissance et la longueur d’onde du laser, la sensibilité du récepteur et la réflectivité des objets scannés. En règle générale, la spécification de la portée de détection est fournie avec la réflectivité de la surface cible ou les conditions environnementales comme référence.
.png?width=638&height=234&name=Untitled%20(14).png)
Il convient de noter que la portée de détection maximale spécifiée par les fabricants de LiDAR est généralement testée sur la base d’une réflectivité de 90 %, ce qui n’est pas pertinent pour une utilisation pratique. La distance de détection à une réflectivité de 10 % a une signification plus pratique car elle s’applique à la plupart des surfaces.
Une portée de détection plus longue est souhaitable pour les systèmes LiDAR car elle permet une plus grande zone de couverture et une collecte de données plus complète.
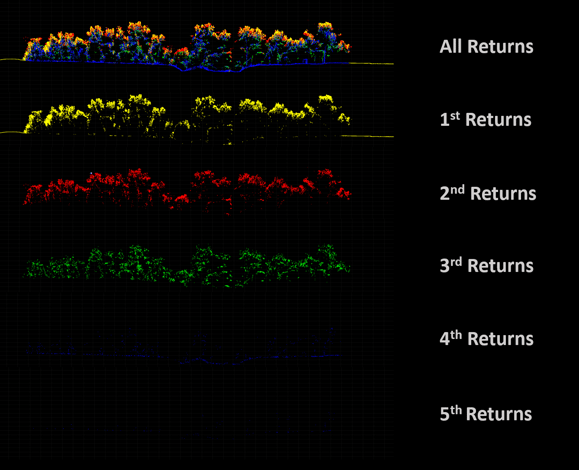
Retours multiples
Le laser d’un système LiDAR envoie des impulsions. Lorsque ces impulsions heurtent des obstacles, elles sont réfléchies. Comme la lumière n’est pas complètement bloquée, elle continue à émettre des impulsions et à rebondir à chaque fois qu’elle heurte quelque chose. On a alors l’impression que le LiDAR peut « voir à travers » la végétation. En réalité, le LiDAR détecte le sol et la canopée des arbres en regardant à travers les interstices entre les feuilles.
- Premier retour : Il s’agit de la première réflexion captée par le capteur, souvent depuis l’objet le plus haut sur le trajet de l’impulsion laser (comme la cime des arbres ou le sommet des bâtiments).
- Retours intermédiaires : Ce sont des réflexions d’objets situés entre l’objet le plus haut et le sol (comme des branches ou des fenêtres).
- Dernier retour : Il s’agit généralement de la réflexion sur le sol ou la base d’un objet.
*La pluie ou le brouillard dans l’air peuvent provoquer des interférences et du bruit dans les données LiDAR. Dans ces situations, il est conseillé d’utiliser le « retour unique » le plus puissant.
Applications connexes
La capacité de détecter plusieurs retours permet une compréhension plus détaillée de l’objet. Par exemple :
- Extraction de végétation : Segmentation des plantes individuelles, comptage, calcul de la biomasse et analyse des paramètres de végétation.
- Cartographie topographique : Extraction de MNT (Modèle Numérique d’Élévation) à partir de MNS (Modèle Numérique de Surface) pour l’analyse du terrain.
- Modélisation des lignes électriques : Les lignes électriques se chevauchent souvent et la capacité de retour multiple peut mesurer plusieurs couches de fils en une seule fois, réduisant ainsi les données manquantes dues aux obstructions.
Divergence de faisceau
La divergence du faisceau fait référence à l’étalement ou à l’élargissement d’un faisceau laser sur une distance. La divergence du faisceau représente l’angle auquel le faisceau laser s’étale lorsqu’il se déplace depuis le capteur LiDAR et s’éloigne de son point d’origine.
Essentiellement, une divergence de faisceau plus petite signifie que le laser reste plus concentré sur de plus longues distances, tandis qu’une divergence de faisceau plus grande signifie que le laser s’étalera davantage au fur et à mesure de son déplacement.
Impact sur la pénétration de la canopée
Dans des environnements tels que les forêts, une divergence de faisceau plus faible (un faisceau plus focalisé) est généralement plus efficace pour pénétrer la canopée et atteindre le sol en dessous. En effet, un faisceau laser plus concentré peut plus facilement trouver les espaces entre les feuilles et les branches, ce qui permet une meilleure détection des points au sol. En revanche, un laser avec une divergence de faisceau plus élevée risque de se disperser davantage dans la canopée et peut ne pas atteindre le sol de la forêt aussi efficacement.
.png?width=771&height=507&name=Untitled%20(6).png)
Impact sur la densité et la résolution des points
Alors qu’un faisceau plus focalisé (divergence plus faible) peut donner des résultats plus précis et avec une résolution plus élevée, un faisceau avec une divergence plus grande peut couvrir une zone plus grande à chaque impulsion, ce qui entraîne une densité de points et une résolution potentiellement inférieures sur la cible.Impact sur la densité de points et la résolution.
Impact sur la portée et la distribution d’énergie
Les lasers avec une divergence de faisceau plus faible conservent leur concentration d’énergie sur de plus longues distances. Cela est crucial pour les systèmes LiDAR qui doivent fonctionner sur de longues distances. À mesure que le faisceau diverge davantage, l’énergie se répand sur une zone plus large, ce qui peut diminuer la puissance du signal de retour, en particulier sur de longues distances.
Interaction atmosphérique
La divergence du faisceau peut également jouer un rôle dans la manière dont le laser interagit avec les particules présentes dans l’atmosphère, comme la poussière, le brouillard ou la pluie. Un faisceau laser présentant une divergence plus importante peut se disperser davantage en raison des interactions avec ces particules, ce qui peut réduire la portée effective et la précision du système LiDAR dans certaines conditions.
Taux d’échantillonnage
Le taux d’échantillonnage fait référence au nombre de points collectés par un système LiDAR sur une période donnée. Il est mesuré en hertz (Hz). Un taux d’échantillonnage plus élevé signifie que davantage de points sont collectés par seconde, ce qui produit un nuage de points plus dense.
Cependant, un taux d’échantillonnage plus élevé signifie également que davantage de données sont collectées, ce qui peut entraîner des tailles de fichiers plus importantes et des temps de post-traitement plus longs. Par conséquent, le taux d’échantillonnage d’un système LiDAR doit être soigneusement choisi en fonction des besoins de densité spécifiques du projet.
Il est important de noter que le taux d’échantillonnage ne détermine pas à lui seul la précision des données LiDAR. D’autres facteurs, tels que la divergence du faisceau laser et la précision de l’IMU et du GPS, jouent également un rôle important dans la détermination de la précision des données.
Étalonnage IMU
La précision du LiDAR est étroitement liée à la précision de l’IMU. Lorsqu’un drone vole à un rythme soutenu, l’IMU peut perdre sa précision. Par conséquent, la plupart des systèmes LiDAR aéroportés nécessitent un étalonnage de l’IMU avant, pendant et après le vol. Si l’IMU n’est pas étalonné, cela peut entraîner des données inexactes, affectant les analyses ultérieures et les applications qui s’appuient sur les données LiDAR.
Il existe deux méthodes courantes pour calibrer l’IMU pendant le vol du drone : les étalonnages en « huit » et « accélération-ralentissement ». Les méthodes d’étalonnage manuelles et automatiques donnent les mêmes résultats.
Le système LiDAR intégré de DJI utilise la méthode d’étalonnage « accélération/ralentissement » et le processus d’étalonnage de l’IMU est automatiquement intégré lors de tout vol de mission. Lorsque vous pilotez manuellement le système LiDAR de DJI, l’application DJI Pilot rappelle à l’utilisateur de recalibrer l’IMU après une période de vol.
.png?width=596&height=374&name=Untitled%20(7).png)
Facteurs affectant la performance
L’efficacité et le taux de pénétration peuvent être affectés par divers facteurs de la technologie LiDAR. La divergence du faisceau et les retours multiples jouent un rôle dans la pénétration, tandis que l’étalonnage de l’IMU affecte la précision. L’alignement des bandes a un impact sur la précision, et différentes méthodes de numérisation affectent la couverture et la densité du balayage vertical. La vitesse de vol et le taux d’échantillonnage ont également un impact sur la densité.
Facteurs affectant la densité :
- Taux d’échantillonnage : Une fréquence de répétition d’impulsions (PRF) ou un taux d’échantillonnage plus élevé peut entraîner une densité de points plus élevée, en supposant que d’autres facteurs comme la vitesse de vol et l’altitude restent constants.
- Altitude de vol : Voler à une altitude inférieure entraîne généralement une densité de points plus élevée car les impulsions laser ont une empreinte plus petite sur le sol.
- Chevauchement : L’arpentage avec des lignes de vol qui se chevauchent peut augmenter la densité de points dans les régions qui se chevauchent.
- Terrain et végétation : Des caractéristiques telles que des forêts denses peuvent entraîner plusieurs retours d’une seule impulsion laser, augmentant potentiellement la densité effective dans ces zones.
- Vitesse de vol : Une vitesse de vol plus lente permet une densité de points plus élevée puisque le capteur LiDAR a plus de temps pour envoyer des impulsions laser et détecter leurs retours.
Traitement des données LiDAR brutes
Densité du nuage de points
La densité décrit le nombre de points LiDAR collectés par unité de surface. Elle est souvent exprimée en points par mètre carré (pts/m^2). Par exemple, une densité de 10 pts/m^2 signifie qu’en moyenne, il y a 10 points de retour LiDAR dans chaque mètre carré de la zone étudiée.
Les différentes industries verticales ont des exigences différentes en matière de densité de nuages de points :
- Arpentage et cartographie : Pour les cartes à l’échelle 1:500, la densité de nuage de points requise est ≥ 16 points/mètre carré.
- Inspection des lignes électriques : Pour une analyse détaillée des barrières arborées ou des inspections approfondies, les lignes de transmission nécessitent généralement au moins 25 points/mètre carré. Certaines spécifications exigent des densités encore meilleures, allant généralement de 50 à 250 points/mètre carré.
- Enquête forestière : Une densité de nuage de points d’au moins 20 points/mètre carré est nécessaire pour répondre aux exigences de segmentation individuelle des arbres.
.png?width=682&height=380&name=Untitled%20(8).png)
Les logiciels de traitement de nuages de points bruts disposent généralement également d’une fonction permettant d’ajuster la densité de points
Vérification de la précision de l’élévation LiDAR
La vérification de l’exactitude des données LiDAR à l’aide de points de contrôle d’élévation est une méthode courante pour garantir que les modèles numériques d’élévation (MNE) ou les modèles numériques de terrain (MNT) dérivés sont des représentations précises du sol.
Principes de mise en place de points de contrôle d’élévation :
- Les points de contrôle doivent être répartis uniformément et positionnés de manière visible.
- Évitez de les placer dans des zones où les pistes de vol se chevauchent ou où il y a des changements d’altitude soudains.
- Les points de contrôle doivent être situés sur des surfaces exposées et planes.
- La référence d’élévation des points de contrôle doit correspondre à la référence d’élévation du nuage de points laser.
Directives pour les points de contrôle d’altitude :
- Répartissez les points de contrôle uniformément dans les endroits dégagés.
- Ne les placez pas à des endroits où les trajectoires de vol se croisent ou où le niveau du sol change rapidement.
- Ils doivent être placés sur un terrain dégagé et plat.
- Assurez-vous que leur hauteur correspond à la hauteur utilisée dans les données LiDAR.
Format de nuage de points LAS
Le format LAS a été développé par l’American Society for Photogrammetry and Remote Sensing (ASPRS) pour permettre l’échange de données de nuages de points LiDAR entre différentes entreprises et agences. Le format LAS est un format de fichier standardisé pour le stockage et l’échange de données de nuages de points LiDAR, contenant des informations sur l’emplacement, l’intensité, la classification et d’autres attributs de chaque point. Il s’agit également du résultat livrable des systèmes DJI LiDAR.
Le format LAS pour les données de nuage de points inclut des informations telles que les coordonnées tridimensionnelles des points, les couleurs RVB, la réflectivité, l’heure GPS, le nombre de retours et le retour d’un point.
Le contrôle de version du fichier LAS peut poser problème lors de la lecture ou de l’écriture d’un fichier. Il est important de s’assurer que la version du fichier LAS utilisée est compatible avec le logiciel tiers utilisé pour le traiter. Certains logiciels tiers peuvent ne pas être en mesure de lire ou d’écrire certaines versions de fichiers LAS. Si un problème de compatibilité survient, il peut être nécessaire d’utiliser une version différente du fichier LAS ou de trouver un autre logiciel tiers prenant en charge la version utilisée. DJI Terra exporte les données du nuage de points LiDAR au format LAS version 1.2, qui est une version hautement compatible du fichier LAS.
Colorisation du nuage de points
Les nuages de points colorés peuvent fournir un contexte supplémentaire aux utilisateurs, facilitant ainsi l’interprétation et la compréhension des données. Par exemple, un bâtiment et un arbre peuvent avoir des formes structurelles similaires sous certains aspects, mais la couleur peut les différencier instantanément.
La plupart des systèmes LiDAR aériens sont équipés de caméras RVB qui capturent des images haute résolution simultanément à la collecte de données LiDAR. Ces images peuvent ensuite être utilisées pour attribuer des valeurs de couleur aux points LiDAR correspondants.
Avantages de la colorisation :
- Attractivité visuelle : les nuages de points colorisés sont plus attrayants visuellement et compréhensibles que ceux en niveaux de gris.
- Analyse améliorée : la couleur peut fournir des informations supplémentaires, par exemple en aidant à l’analyse de la végétation en distinguant différents types de plantes ou dans la cartographie urbaine pour différencier différentes infrastructures.
- Intégration avec d’autres ensembles de données : un nuage de points colorisé peut être facilement intégré à d’autres ensembles de données géospatiales, offrant une vue complète d’une zone étudiée.
- Processus de photogrammétrie supplémentaire : les photos RVB peuvent également être utilisées pour le traitement de photogrammétrie, en plus de la coloration des nuages de points.
.png?width=788&height=456&name=Untitled%20(9).png)
Trajectoire de vol
La trajectoire désigne le chemin parcouru par un drone équipé d’un système LiDAR lors de la collecte de données. La trajectoire est un facteur essentiel dans le traitement des données LiDAR car elle fournit des données de localisation pour chaque point du nuage de points. Les informations sur la trajectoire sont nécessaires pour géoréférencer avec précision les données LiDAR et produire des modèles 3D précis de la zone étudiée.
SBET signifie Smoothed Best Estimate of Trajectory (estimation optimale de trajectoire lissée). Il s’agit d’un format de fichier post-traité couramment utilisé qui contient des données GPS et IMU extrêmement précises. Ce format de fichier de trajectoire peut être corrélé avec le nuage de points LAS pour un post-traitement ultérieur. Le fichier de trajectoire de post-traitement de la mission LiDAR est généralement généré automatiquement avec le fichier LAS de nuage de points livrable. Il peut être importé dans un logiciel tiers pour l’affichage de la trajectoire.
.png?width=807&height=359&name=Untitled%20(10).png)
Réglage de la bande
L’ajustement des bandes est une procédure permettant de corriger les erreurs systématiques et les désalignements dans les données LiDAR aéroportées, en particulier lorsqu’elles sont collectées sur plusieurs bandes de vol. Lorsqu’un terrain est étudié à l’aide d’un LiDAR aéroporté, la zone est généralement couverte par plusieurs bandes ou trajectoires de vol qui se chevauchent. Le chevauchement est intentionnel pour assurer la continuité de la couverture et faciliter la correction des erreurs.
Lors de l’acquisition de données LiDAR, plusieurs facteurs peuvent introduire des erreurs dans les données :
- Dérive du capteur : Au fil du temps, l’IMU et le GPS peuvent subir de légères dérives dans leurs lectures.
- Dynamique de vol : Les turbulences, les changements rapides d’altitude et les changements d’orientation de l’avion peuvent influencer les données capturées.
En raison de ces facteurs, les bandes de vol adjacentes peuvent parfois présenter des décalages verticaux ou horizontaux. Si elles ne sont pas corrigées, ces erreurs peuvent affecter les analyses et applications ultérieures qui s’appuient sur les données LiDAR.
Avantages du réglage de la bande :
- Cohérence des données améliorée : Réduit les incohérences et assure la continuité entre les bandes de vol adjacentes.
- Produits dérivés de meilleure qualité : La qualité des produits dérivés tels que les modèles numériques d’élévation (MNE) et les modèles numériques de surface (MNS) est améliorée.
- Fiabilité : Augmente la confiance dans la précision de l’ensemble de données LiDAR, le rendant plus fiable pour diverses applications, de la cartographie topographique à la foresterie.
Traitement des données LiDAR brutes avec le logiciel DJI Terra
Le logiciel DJI Terra est le seul logiciel pris en charge utilisé pour traiter et exporter les données brutes de nuage de points LiDAR collectées à partir d’un système DJI LiDAR au format LAS universel.
Principales fonctionnalités du traitement LiDAR
DJI Terra est un logiciel gratuit de traitement de données brutes LiDAR qui permet de créer des livrables de nuages de points LAS à partir des données brutes LiDAR. Il est également doté de fonctionnalités supplémentaires.
Ajuster la densité du nuage de points
Indique le nombre de points collectés par unité de surface. Cette fonctionnalité permet d’ajuster la densité de points pour répondre aux exigences spécifiques du secteur.
Optimiser la précision du nuage de points
Cette fonctionnalité utilise l’algorithme de projections préservant la localité (LPP) pour minimiser le phénomène de superposition courant des nuages de points, en alignant les nuages de points sur une couche plus fine pour améliorer la précision du modèle de nuage de points.
Nuage de points lisse
Cette fonctionnalité affine le nuage de points en filtrant le bruit et en réduisant l’impact des erreurs pour créer une représentation visuelle plus fluide.
Classification des points de masse
Utilisé pour distinguer les points au sol des autres objets dans le nuage de points pour générer un modèle numérique d’élévation (DEM).
Générer un DEM
Cette fonctionnalité génère un modèle numérique d’élévation (DEM) au format GeoTiFF à partir du nuage de points au sol classé.
Contrôle de précision verticale et décalage
Vérifie l’exactitude des données LiDAR à l’aide de points de contrôle d’élévation pour garantir que les DEM ou DTM dérivés sont des représentations précises du sol.
Transformation du système de coordonnées
Permet une transformation facile des systèmes de coordonnées projetées ou géodésiques locaux pour différents projets de cartographie et d’arpentage dans le monde entier.
.png?width=770&height=446&name=Untitled%20(12).png)
Applications LiDAR aéroportées
Gestion forestière
Le LiDAR est utilisé dans de nombreuses applications de gestion forestière. Il permet d’estimer la hauteur des arbres, de mesurer la biomasse et de cartographier la structure de la forêt. Grâce au LiDAR, les gestionnaires forestiers peuvent obtenir des informations détaillées sur la canopée forestière, ce qui est difficile à obtenir avec les méthodes d’enquête traditionnelles. L’un des principaux avantages du LiDAR est sa capacité à détecter plusieurs retours d’une seule impulsion laser, ce qui lui permet de « voir à travers » la végétation et de cartographier avec précision la surface du sol. Cette capacité rend le LiDAR particulièrement utile pour estimer l’élévation du sol et identifier les changements de couverture forestière au fil du temps, ce qui peut être utile pour suivre les efforts de déforestation et de reforestation. En outre, le LiDAR peut contribuer à l’élaboration d’inventaires forestiers, qui sont essentiels à la gestion durable des forêts.
Mesure volumétrique
La technologie LiDAR permet de fournir des mesures précises pour les calculs de volumétrie, ce qui est utile pour les secteurs tels que l’exploitation minière, la construction et la foresterie. En utilisant les données de nuages de points LiDAR, il est possible de calculer avec précision le volume d’un stock ou la quantité de matériaux retirés d’un site. Ces informations peuvent être utilisées pour la gestion des stocks, le contrôle des coûts et la planification des ressources.
Relevé topographique
Le LiDAR est un outil efficace pour les relevés topographiques, car il permet de cartographier avec précision la forme et les caractéristiques de la surface de la Terre. Contrairement à la photogrammétrie, le LiDAR peut pénétrer à travers la canopée et capturer des mesures précises de la surface du sol, même dans les zones à couverture végétale dense. En effet, le LiDAR utilise des impulsions laser pour détecter le sol et la canopée des arbres en regardant à travers les interstices entre les feuilles, ce qui permet une meilleure détection des points au sol.
Recherche archéologique
Le LiDAR aéroporté peut être facilement utilisé dans la recherche archéologique pour cartographier des zones immenses et difficiles d’accès et découvrir des structures cachées à la surface. Le capteur LiDAR peut pénétrer la végétation et capturer des données à haute résolution, ce qui permet d’identifier des structures qui seraient difficiles ou impossibles à voir depuis le sol. Cela peut aider les archéologues à mieux comprendre l’agencement des villes et des établissements anciens et à mieux comprendre l’activité humaine passée.
Inspection des lignes électriques
La technologie LiDAR peut être utilisée pour inspecter les lignes électriques, ce qui peut s’avérer difficile en raison de la hauteur et de l’emplacement des lignes. En utilisant les données de nuage de points LiDAR, il est possible de créer une carte détaillée des lignes électriques et de leurs environs. Cela peut aider à identifier les problèmes potentiels tels que la croissance de la végétation ou l’affaissement des lignes, qui peuvent provoquer des pannes de courant ou des risques pour la sécurité.
Inspection des infrastructures
Grâce à la capacité du LiDAR à détecter les petites imperfections et les fissures, de nombreuses entreprises utilisent cette technologie pour scanner les routes et les façades des bâtiments et des ponts. Cela peut aider à alerter les chefs de projet des problèmes liés aux structures qui doivent être résolus immédiatement. En ce qui concerne la capture de façades en particulier, il est important de mettre en œuvre un système LiDAR qui est stabilisé pour faire face à la façade.

