FAQ sur les solutions géospatiales de DJI Enterprise
Les réponses à toutes vos questions géospatiales
DJI Enterprise propose une large gamme de produits pour les professionnels des systèmes d’informations géospatiales. Voici quelques questions fréquemment posées et leurs réponses concernant les produits suivants :
- Mavic 3 Enterprise
- Matrice M350/M300 RTK + Zenmuse L1
- Matrice M350/M300 RTK + Zenmuse P1
- DJI Terra
Ce document fournit des réponses aux questions fréquemment posées, ainsi que des informations et des spécifications détaillées pour chaque produit. En outre, il fournit des conseils et des recommandations pour le traitement des données et l’obtention de résultats précis.
Solutions géospatiales
Quels sont les avantages et les inconvénients du Mavic 3 Enterprise, et des Zenmuse L1 et Zenmuse P1 ?
| Produit |
Avantages |
Inconvénients |
|
M350 RTK + Zenmuse L1 |
– Forte adaptabilité : non affecté par les conditions d’éclairage et capable de modéliser dans des environnements à faible texture. – Les résultats peuvent être utilisés pour extraire un modèle numérique d’élévation (DEM) avec pénétration du couvert végétal. – Capable de capturer facilement des structures fines à partir des nuages de points, telles que les lignes de transmission. – Haute efficacité de modélisation : un seul vol peut couvrir un site de 200 hectares (494 acres) [1]. |
– La précision dépend relativement du statut POS initial – Un post-traitement ultérieur des données du nuage de points est nécessaire à l’aide d’un logiciel tiers pour fournir un livrable de nuage de points classé à utiliser. |
|
M350 RTK + Zenmuse P1 |
– Prend en charge plusieurs modes de fonctionnement : orthophoto 2D, oblique 3D, photographie de près, etc. – Efficacité opérationnelle élevée : un vol peut collecter 300 hectares (741 acres) d’orthophoto [2]. – Haute précision : peut répondre à la précision de l’enquête cadastrale 1:500 sans appliquer les GCP. – Nombre de pixels élevé : jusqu’à 45 millions de pixels avec la caméra plein format. |
– Impossible de résoudre le problème de modélisation nocturne ou de zone de modélisation avec une faible texture. – Comme les solutions de photogrammétrie ne peuvent pas pénétrer le couvert végétal comme le LiDAR, les modèles résultants sont limités aux résultats DSM et ne peuvent pas produire de résultats DEM. – Le processus de photogrammétrie nécessite beaucoup plus de puissance de traitement GPU pour effectuer une triangulation aérienne et générer des modèles à partir d’images brutes. En revanche, les données LiDAR doivent uniquement être converties dans un format universel pour être utilisées. Par conséquent, l’efficacité des phases de capture et de traitement des données dans la solution de photogrammétrie serait inférieure à celle de la solution LiDAR. |
|
Mavic 3 Enterprise |
– Seuil d’entrée bas, très économique – Petit, portable, facile à utiliser – Par rapport au Phantom 4 Pro ou Phantom 4 RTK, le Mavic 3 Enterprise est plus léger et plus portable, avec de meilleures capacités d’évitement des obstacles, une plus grande autonomie de la batterie et des caractéristiques de caméra supérieures. |
– Rendement de fonctionnement relativement faible par rapport à P1 – Nombre de pixels de la caméra inférieur à P1 – Ne convient pas aux opérations à grande échelle – Les inconvénients de Zenmuse P1 existent également avec Mavic 3 Enterprise |
Remarque :
[1] Vitesse de vol de 36 km/h (22,37 mph), altitude de vol de 100 m (328 pi), superposition latérale de 20 %, temps de collecte des données de 30 minutes, densité du nuage de points supérieure à 200 points/m²*.
[2] Avec un objectif de 35 mm, une GSD de 3 cm, paramètres de mission de vol : superposition avant de 75 %, superposition latérale de 55 %.
Comparaison des capacités de photogrammétrie entre les caméras :
|
Mavic 3 Enterprise avec module RTK (caméra grand angle) |
Matrice M350 RTK + Zenmuse P1 |
Matrice M350 RTK + Zenmuse L1 |
|
|
Taille |
Petite taille |
Taille moyenne |
Taille moyenne |
|
Qualité de topographie |
Oui |
Oui |
Oui |
|
Prise en charge RTK/PPK |
Oui |
Oui |
Oui |
|
GSD (cm) |
H(m)/36,5 |
24mm : H(m)/5 535 mm : H(m)/8 050 mm : H(m)/120 |
H(m)/36,5 |
|
Taille du capteur |
4/3″ 5 280 x 3 956 (4:3) |
Plein format (35,9 x 24 mm) 8 192 x 5 460 (3:2) |
1″ 5 472 x 3 648 (3:2) |
|
Résolutions des images fixes |
20 MP |
45 MP |
20 MP |
|
Taille de pixel |
3,3 μm |
4,4 μm |
2,4 μm |
|
Option d’objectif |
12 mm/24mm Équivalent FOV 84,0° |
DL 24 mm; FOV 84,0° |
8,8 mm/24 mm Équivalent FOV 84,0° |
|
Obturateur mécanique |
Oui (1/2 000-8s) |
Oui (1/2 000-1s) |
Oui (1/2 000-8s) |
|
Intervalle photo minimum |
0,7 s |
0,7 s |
2,5 s |
|
Temps de vol |
Jusqu’à 42 min (avec le module RTK) |
Jusqu’à 44 min |
Jusqu’à 42 min |
|
Mémoire requise |
Indice de vitesse microSD UHS-I 3 ou supérieur Capacité max. : 512 Go |
SD Indice UHS-I ou supérieur Capacité max. : 512 Go |
microSD Indice de vitesse UHS-I 3 ou supérieur Capacité max. : 256 GB |
|
Résistance au vent maximale |
12 m/s |
12 m/s |
12 m/s |
|
Prise en charge Smart Oblique |
Oui |
Oui |
Oui |
|
Prise en charge Real-time Terrain-follow |
Oui |
Non |
Non |
|
Prise en charge application SDK et tierces |
Oui |
Oui |
Oui |
HowComment accéder aux paramètres de distorsion de l’objectif ?
Pour accéder manuellement aux paramètres de distorsion de l’objectif, ouvrez l’image au format « .jpg » sous forme de fichier texte, recherchez le mot-clé « DewarpData » dans le champ de données XMP. Le format du texte doit être similaire à drone-dji : DewarpData = « 2023-03-13;3663.4800000000… »
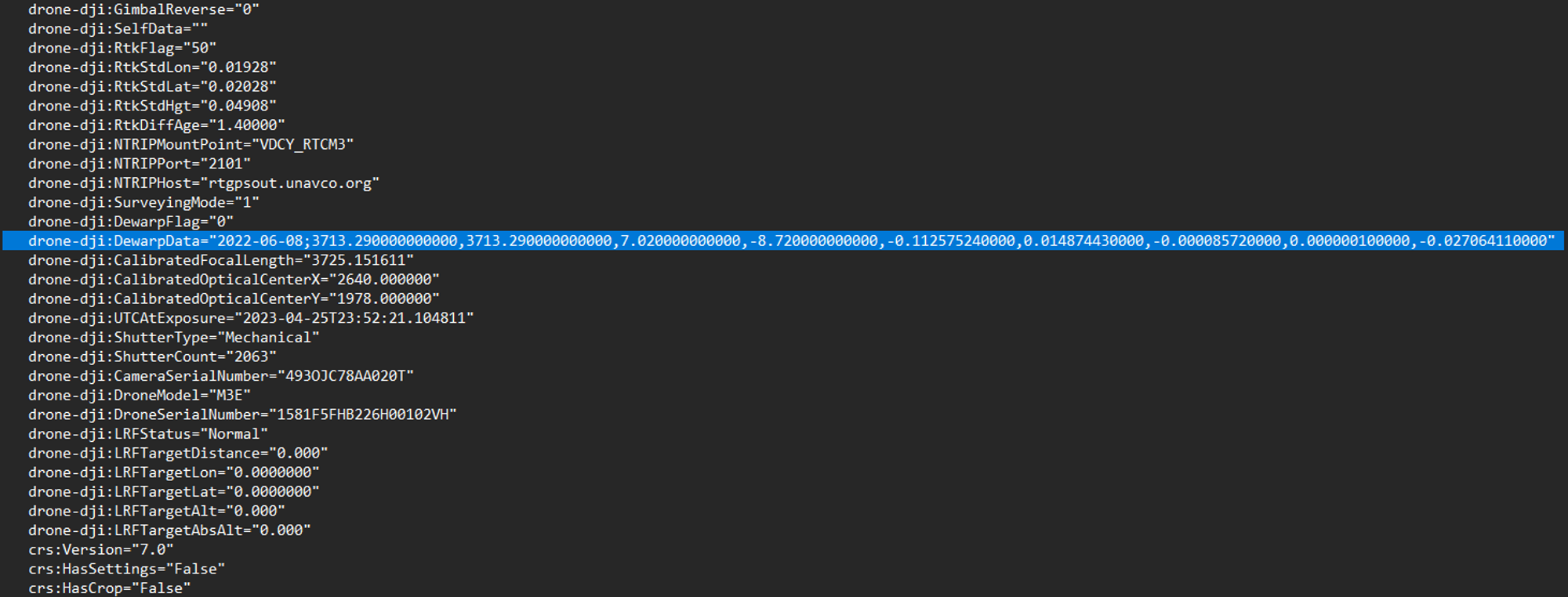
Les numéros dans l’ordre correspondent à : « calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3 », « fx,fy » représente la distance focale dans le pixel, « cx,cy » représente le centre optique exprimé en coordonnées de pixel (point d’origine comme centre de l’image), « k1,k2, k3 » représente la distorsion radiale, « p1,p2 » représente la distorsion tangentielle
Pour plus d’informations, reportez-vous au Guide relatif à l’étalonnage de la caméra avec OpenCV.
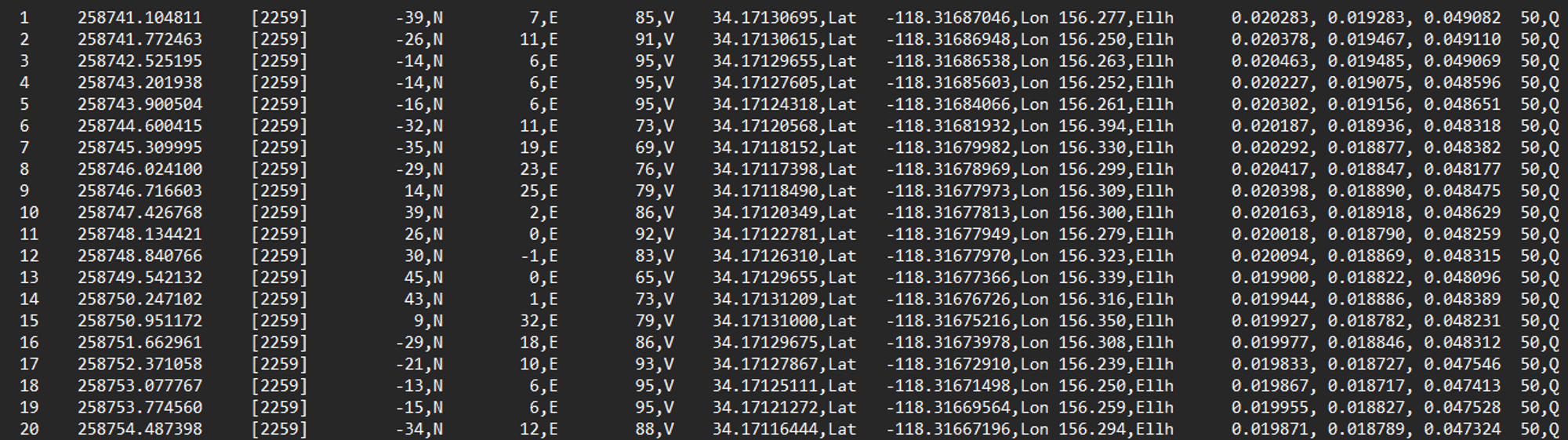
Que représente chaque colonne de données dans le fichier XXX_Timestamp.MRK file?
Colonne 1 : numéro de photo correspondant
Colonne 2 : temps d’exposition du GPS, secondes de la semaine (heure UTC)
Colonne 3 : temps d’exposition de la semaine GPS (heure UTC)
Colonne 4 : valeur de compensation de phase entre l’antenne nord (N) et le centre du capteur CMOS (Unité : millimètre)
Colonne 5 : valeur de compensation de phase entre l’antenne est (E) et le centre du capteur CMOS (Unité : millimètre)
Colonne 6 : valeur de compensation de phase entre l’antenne directionnelle haut et bas (vers le bas comme positive) (V) et le centre du capteur CMOS (Unité : millimètre)
Colonne 7 : latitude en temps réel (colonne 8) et longitude (colonne 8) du centre CMOS obtenues au moment de l’exposition, en degrés décimaux.
Colonne 9 : hauteur en temps réel du centre CMOS obtenue au moment de l’exposition, en mètres. Cette hauteur est la hauteur géodésique (communément appelée hauteur ellipsoïde), par rapport à la surface ellipsoïde de référence par défaut (les utilisateurs peuvent définir leur propre modèle ellipsoïde, la valeur par défaut est WGS84, les utilisateurs peuvent la définir sur d’autres ellipsoïdes en accédant à différents systèmes/points de référence de station CORS, tels que CGCS2000). Notez que cette hauteur n’est pas basée sur le repère d’élévation EGM96/2008 (hauteur orthométrique) couramment utilisé dans le monde entier.
Colonnes 10 à 12 : la déviation standard du positionnement se traduit respectivement par le nord, l’est et le haut indiquant la précision relative du positionnement dans les trois directions. L’unité est le mètre.
Colonne 13 : statut RTK, positionnement 0-no, mode de positionnement 16 points uniques, solution flottante 34-RTK, solution fixe 50-RTK. Lorsque l’indicateur d’une photo n’est pas 50, il n’est pas recommandé d’utiliser cette photo directement pour la cartographie.
Zenmuse L1
Est-il possible d’utiliser des points de contrôle au sol (GCP) pour traiter les données LiDAR dans DJI Terra ?
DJI Terra ne prend pas en charge l’importation GCP pour les données LiDAR. Toutefois, pour appliquer les GCP aux données LiDAR de la L1, il est recommandé d’utiliser des logiciels tiers tels que le logiciel de drones TerraSolid pour appliquer les GCP aux données LiDAR L1.
Quel est le format de sortie des données de la Zenmuse L1 en plus du format LAS ?
PNTS, PLY, PCD, S3MB.
Est-il possible de traiter des données brutes L1 sans connexion RTK ? Les données brutes de la Zenmuse L1 peuvent-elles être traitées pendant un vol GPS normal ?
Oui, il est possible de traiter des données brutes L1 sans connexion RTK. Cependant, vous devez ajouter un fichier d’observation de station de base (fichier RINEX, RTCM, OEM ou UBX) au dossier de données brutes L1 avec le reste des données brutes afin de traiter et de générer correctement le fichier de nuage de points dans DJI Terra. Ce processus est appelé cinématique post-traitement (PPK).
Pour plus d’informations sur ce processus, reportez-vous au guide d’utilisation, en particulier à la page 11 : https://dl.djicdn.com/downloads/Zenmuse_L1/20230420/DJI_L1_Operation_Guidebook_V1.2.pdf
Est-il possible de fusionner les données de plusieurs vols avec la Zenmuse L1 dans un nuage de points unique dans DJI Terra ?
Oui, vous pouvez importer plusieurs dossiers de données brutes capturées lors de vols avec la L1 : cochez l’option « Sortie fusionnée » et créez un nuage de points de sortie dans un fichier LAS à l’aide de Terra.
Quelle est la différence entre un retour unique, double et triple et quels sont les meilleures utilisations recommandées ?
Mode Retour/Écho : indique que LiDAR peut recevoir plusieurs retours après avoir tiré un faisceau de lumière laser.
Le mode Retour unique signifie qu’un point laser est tiré et que LiDAR peut recevoir au maximum un retour. Le mode Double retour signifie qu’un point laser est tiré et que LiDAR peut recevoir au maximum deux retours. Le mode Triple retour signifie que LiDAR peut recevoir au maximum trois retours pour chaque point laser.
Si seules des informations de surface ou DSM sont nécessaires, le mode Retour unique est suffisant. Cependant, dans des scénarios tels que la topographie forestière, qui nécessite la pénétration du couvert végétal et des données DEM, le mode Double ou Triple retour est nécessaire.
La Zenmuse L1 peut-elle être montée sur la double nacelle descendante ou montante du M350/M300 RTK ?
Non, la Zenmuse L1 ne peut être montée que sur la nacelle descendante unique de M300/M350 RTK. Si vous l’utilisiez sur la double nacelle descendante ou montante, l’emplacement de la nacelle serait différent de l’emplacement prédéfini, ce qui aurait une incidence sur la précision.
Zenmuse P1
L’objectif de la Zenmuse X7 fonctionne-t-il sur la Zenmuse P1 ?
Uniquement les modèles 24 mm, 35 mm et 50 mm. Le modèle 16 mm ne fonctionne pas avec P1 en raison de la taille du capteur.
La précision répond aux exigences de qualité de topographie après un étalonnage correct. Vous pouvez utiliser le logiciel DJI Terra pour étalonner et écraser les nouveaux paramètres de l’objectif pour la première fois, comme indiqué ci-dessous.
J’ai changé d’objectif Zenmuse P1 et maintenant, tous les paramètres de l’objectif de la caméra sont obsolètes. Comment ré-étalonner les paramètres intrinsèques avec un nouvel objectif ?
Pour vérifier si l’objectif P1 est correctement étalonné, ouvrez d’abord la photo P1.jpg sous forme de fichier texte et recherchez le champ de données XMP « DewarpData ». Si ce champ n’est pas répertorié, cela indique que l’objectif n’a pas été correctement étalonné. Pour réétalonner les paramètres de distorsion de l’objectif, suivez la procédure ci-dessous :
- Collecte des données d’étalonnage
- Il est recommandé de procéder à l’étalonnage dans des zones présentant de grandes différences d’altitudes telles que les bâtiments ou les collines.
- Utilisez Smart Oblique Capture ou Oblique Mission (cinq itinéraires) pour planifier la mission.
- Exigences relatives aux paramètres : les images collectées doivent être supérieures à 100, le taux de superposition avant ne doit pas être inférieur à 80 % et la superposition latérale ne doit pas être inférieure à 70 %, l’image oblique ne doit pas représenter moins de 2/3. (Pas de limite pour l’altitude de vol).
- Activez RTK et décollez après RTK FIX.
- Modélisation : utilisez DJI Terra v2.3.1 et les versions ultérieures pour créer une nouvelle mission de reconstruction 3D et commencer la modélisation
- Étalonnage
- Une fois la modélisation terminée, ouvrez le dossier, recherchez le fichier sfm_report.json dans le répertoire AT-report et copiez-le sur la carte SD de la caméra.
- Insérez la carte SD dans la caméra P1, connectez-la à l’appareil et mettez-la sous tension. La caméra écrit alors automatiquement les paramètres internes après l’étalonnage.
- Prenez une photo, ouvrez-la avec Notepad et recherchez XMP. Si vous trouvez DewarpData, cela signifie que l’étalonnage des paramètres internes de la caméra a réussi.
La Zenmuse P1 peut-elle être montée sur la double nacelle descendante ou montante du M350/M300 RTK ?
Non, la Zenmuse P1 ne peut être montée que sur la nacelle descendante unique de M300/M350 RTK. Si vous l’utilisiez sur la double nacelle descendante ou montante, l’emplacement de la nacelle serait différent de l’emplacement prédéfini, ce qui aurait une incidence sur la précision.
DJI Terra
Existe-t-il un logiciel de traitement de photogrammétrie capable d’assembler et de convertir des images de drones en une carte 2D ou un modèle 3D ?
Oui, vous pouvez utiliser le logiciel DJI Terra à cette fin. DJI Terra peut produire un modèle de surface numérique (DSM), une véritable carte orthophoto numérique (TDOM) au format geotiff ainsi que des modèles de maillage 3D ou de nuage de points.
Quel logiciel recommandez-vous pour traiter les images en une carte orthophoto et pour produire les surfaces numériques ?
Nous vous recommandons d’utiliser DJI Terra pour le traitement hors ligne, ou un logiciel tiers adapté à vos besoins.
Que dois-je vérifier avant de traiter des photos de drone dans DJI Terra ?
Dans les paramètres de la caméra, assurez-vous que l’option « Obturateur mécanique » est activée et que l’option « Dégauchissement » est désactivée avant le vol.
Si vous utilisez le PPK, assurez-vous que les données de position de l’image sont correctes. Pour le RTK, il n’y a rien de plus à faire avec les photos.
Quelles modifications de traitement supplémentaires peuvent être appliquées aux données d’image de drone importées dans Terra ?
Lors du traitement avec Terra, il n’existe aucun paramètre permettant de régler la concentration des couleurs, l’exposition et d’autres propriétés. Les utilisateurs peuvent uniquement modifier les données POS de l’image, qui incluent les systèmes de coordonnées et les angles Euler. Toutefois, DJI Terra offre des fonctionnalités supplémentaires, telles que la réduction du voile, l’affinement de la surface de l’eau et l’uniformité de la lumière, pour garantir la qualité du résultat de reconstruction.
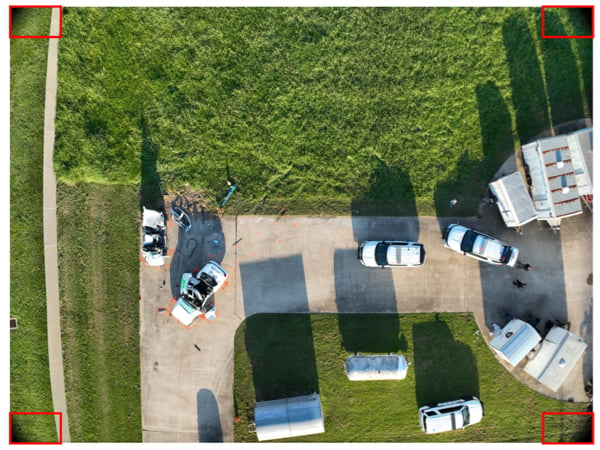
Pendant le vol, comment pouvez-vous réduire les images floues capturées par des drones ?
Il est recommandé de régler la vitesse d’obturation sur une vitesse supérieure à 1/500 s, d’activer l’obturateur mécanique, de régler la sensibilité ISO sur automatique et de régler l’ouverture en conséquence.
Les informations GPS/IMU sont-elles jointes au champ de métadonnées de la photo ?
Oui, vous pouvez également consulter notre manuel P1, pages 22-23, pour plus d’informations sur le champ de métadonnées XMP : Zenmuse_P1 _User Manual_EN_v1.2_3.pdf (djicdn.com).
Les données LiDAR traitées dans DJI Terra peuvent-elles être étalonnées/classées ?
Aucune classification autre que la terre. Terra dispose également de fonctionnalités de base pour réduire le bruit, ce qui affine le nuage de points.
Les données de trajectoire de la Zenmuse L1se trouvent-elles dans un fichier distinct du nuage de point LAS ?
Oui, elles sont générées au format « sbet.out » dans le dossier des résultats du projet Terra.
Le capteur LiDAR de la Zenmuse L1 est-il également doté d’une caméra RVB ? Les données de sortie sont-elles un nuage de point coloré ?
Les photos peuvent être capturées en même temps que les données brutes du nuage de points. Ces photos peuvent être utilisées pour le traitement de photogrammétrie ou la colorisation de nuage de points.
DJI Terra convertira les données en un nuage de points LAS, mais en version 1.2 ou 1.4 ?
LAS v1.2.
Quel est le processus recommandé pour la Zenmuse L1?
Veuillez consulter notre Guide des opérations L1 disponible sur la page Téléchargements L1.
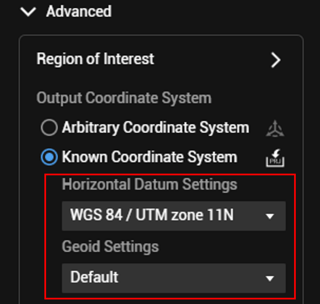
Comment générer le projet de photogrammétrie dans un système de coordonnées connu ?
Sous l’option « Avancé » – « Système de coordonnées de sortie » – « Système de coordonnées connu » – sélectionnez le système de coordonnées connu dans « Paramètres de référence horizontale » et « Paramètres géoïdes ».
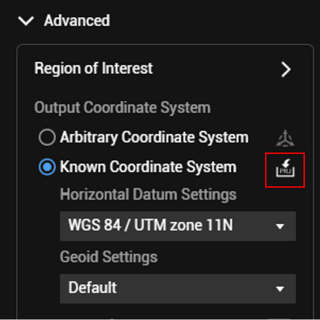
La liste des systèmes de coordonnées Terra connus ne contient pas le système de coordonnées dont j’ai besoin. Comment régler ce problème?
- Si le fichier de projection du système de coordonnées du système de coordonnées est au format « .prj », sous l’option « Avancé », « Système de coordonnées de sortie », « Système de coordonnées connu », cliquez sur l’icône d’importation PRJ et sélectionnez l’importation du système de coordonnées au format PRJ
Si le système de coordonnées cible utilise un système cartésien personnalisé, vous pouvez transformer le résultat TDOM/modèle en système cartésien personnalisé à l’aide de l’outil de transformation à sept paramètres. Se reporter à la page 29 du manuel d’utilisation Terra pour obtenir des instructions détaillées sur cette procédure. https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf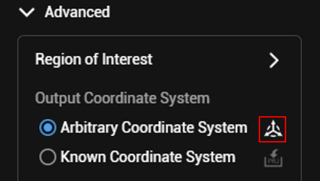
Si l’erreur de sortie est beaucoup plus important lors de la sélection d’un système de coordonnées verticales, comment doit-elle être gérée ?
- Le système de coordonnées verticales de Smart Map utilise uniquement les informations de systèmes de coordonnées verticales accessibles au public. Veuillez confirmer si le fichier d’élévation est ajouté. Pour obtenir des informations spécifiques, rendez-vous sur le site Web https://cdn.proj.org/.
- Si aucun fichier d’élévation n’est ajouté au système de coordonnées verticales utilisé et que le fichier d’anomalie d’élévation pour cette zone n’est pas public, il est recommandé d’améliorer la précision d’élévation en ajoutant d’autres GCP.
Terrain Follow
Comment utiliser la fonction Terrain Follow (suivi de terrain) dans l’application DJI Pilot 2 ?
Il existe plusieurs façons de planifier les vols de suivi de terrain dans l’application Pilot.
- Le modèle ASTER GDEM V3 30m est intégré à l’application Pilot en option. Sélectionnez la mission de cartographie, activez le suivi du terrain, sélectionnez le fichier DSM, puis choisissez de télécharger depuis Internet.
- Importez DSM/DEM au format TIFF dans Pilot, sélectionnez la mission de cartographie, activez le suivi de terrain, sélectionnez le fichier DSM, puis choisissez le fichier TIFF pour importer le modèle de terrain.
- Suivi terrain en temps réel (disponible uniquement sur Mavic 3 Enterprise, Thermal et Multispectral).
Voici un bref tableau récapitulatif expliquant la compatibilité de la fonction Suivi terrain avec différents modes de mission :
|
Types de missions qui prennent désormais en charge le suivi de terrain |
||||
|
Cartographie 2D |
Smart Oblique |
Oblique |
Linéaire |
|
|
Suivi M3E DSM |
✓ |
✓ |
✓ |
✓ |
|
M3E Real-Time Terrain Follow |
✓ |
✓ |
X |
✓ |
|
M3T DSM Follow |
✓ |
X |
✓ |
✓ |
|
M3T Real-Time Terrain Follow |
✓ |
X |
X |
✓ |
|
M30 DSM Follow |
✓ |
X |
✓ |
✓ |
|
M300 RTK DSM Follow |
✓ |
✓ |
✓ |
✓ |
Pourquoi ne puis-je pas importer un fichier tiff WGS84 DSL dans l’application DJI Pilot 2 ?
Veuillez utiliser le système géodésique WGS84 au lieu du système projeté WGS84. Pilot 2 ne reconnaîtra que le fichier EPSG 4326 Geodetic WGS84 DEM/DSM.
Formats photo et Paramètres caméra
Quelle est la liste des formats photos pour le Mavic 3 Enterprise, la Zenmuse P1 ou la Zenmuse L1 ?
- L1 : JPG
- P1 : JPG+DNG
- Mavic 3 Enterprise : JPG+DNG
Quels paramètres d’entrée peuvent être modifiés ?
Réglages du mode de la caméra (Auto, S, A, M), ISO, ouverture, vitesse d’obturation, valeurs d’exposition, mode de mise au point (AF/MF).
Le capteur de la Zenmuse P1 peut-il prendre des photos au format tiff 8/16 bits grand ou petit ?
Non, mais la Zenmuse P1 fournit des données brutes dans DNG.
Quels sont les paramètres recommandés de caméra pour le Mavic 3 enterprise, Mavic 3 Multispectral et le capteur Zenmuse P1 lors de missions de photogrammétrie ?
Pour les paramètres du Mavic 3 Enterprise :
- Assurez-vous de désactiver le paramètre « Dégauchissement »
- Assurez-vous d’activer le paramètre « Obturateur mécanique »
- Sélectionnez « MF » comme mode de mise au point et réglez la mise au point sur l’infini
- Sélectionnez « Auto » pour le mode de réglage de la caméra
- Si vous souhaitez définir manuellement les paramètres de la caméra pour la mission de photogrammétrie, nous recommandons la procédure suivante :
- Réglez ISO sur auto
- Réglez la vitesse d’obturation sur 1/1 000 s ou plus pour éviter le flou de mouvement (mécanique jusqu’à 1/2 000 s)
- Réglez EV sur 0
- Réglez AE entre 5,6 et 11
Pour les paramètres de la Zenmuse P1 :
- Assurez-vous de désactiver le paramètre « Dégauchissement »
- Assurez-vous d’activer le paramètre « Obturateur mécanique »
- Sélectionnez « MF » comme mode de mise au point et réglez la mise au point sur l’infini
- Sélectionnez « M » pour le mode de réglage de la caméra
- Réglez ISO auto
- Réglez manuellement l’ouverture en fonction de la lumière ambiante. Assurez-vous de régler l’ouverture entre 5,6 et 11
- Réglez la vitesse d’obturation sur 1/500 s ou plus pour éviter le flou de mouvement (mécanique jusqu’à 1/2 000 s)
Qu’est-ce que l’option de “Dégauchissement” dans les paramètres de la caméra de l’application DJI Pilot 2 ? Dois-je l’activer ?
L’activation du dégauchissement permet d’étalonner la distorsion optique causée par l’objectif de la caméra, avec des images étalonnées en temps réel capturées et stockées sur la carte micro-SD. La désactivation de la correction de la distorsion signifie que la caméra capture une image non modifiée avec un effet fisheye. Les paramètres de distorsion de l’objectif des modèles Zenmuse P1, Zenmuse L1, Mavic 3 Enterprise grand-angle, Mavic 3 Multispectral grand-angle et Phantom 4 RTK sont tous prémesurés en usine. Ces paramètres uniques sont enregistrés dans « DewarpData » sous le champ XMP pour chaque image prise. Ils sont automatiquement reconnus lorsque ces images sont importées dans le logiciel DJI Terra. Toutefois, pour un logiciel de photogrammétrie tiers, l’utilisateur peut saisir manuellement ces paramètres pour étalonner la distorsion de l’image. Étant donné que l’étalonnage de la distorsion à l’aide d’un logiciel de post-traitement avec les paramètres de dégauchissement de la caméra présente une bien meilleure précision que la fonction de correction de la distorsion intégrée dans l’application Pilot 2, nous vous recommandons de désactiver cette option à des fins de topographie.
RTK/PPK
Quel système de coordonnées est écrit sur les balises géographiques sur la photo ? Est-ce toujours le système géodésique WGS84 ?
Non, le système de coordonnées des images dépend de la source de correction NTRIP RTK et peut ne pas toujours appartenir au système WGS84. Si vous utilisez la station mobile D-RTK2 comme source RTK, le système de coordonnées horizontales sera dans WGS84 EPSG:4326 et le système de coordonnées verticales en hauteur ellipsoïdale. Dans Terra, vous devez définir le système lors de l’importation d’images ; sinon, Terra utilisera par défaut tous les systèmes de coordonnées d’image horizontales dans WGS84 (EPSG:4326) et verticales en hauteur ellipsoïdale.
Comment utiliser une base RTK tierce avec les drones DJI Enterprise ?
Pour les stations de base RTK tierces, il faut d’abord configurer la diffusion du service NTRIP et s’assurer que la base RTK ainsi que le M3M RC se trouvent sous le même réseau Wi-Fi, puis sous l’application Pilot – page de réglage RTK, s’assurer de saisir les informations d’identification pour configurer la connexion NTRIP. Vous trouverez plus d’informations sur la page 46 du manuel : https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20230404/DJI_Mavic_3E_3T_User_Manual_FR.pdf
Est-il nécessaire d’initialiser la station de base D-RTK2 à un emplacement connu avant de l’utiliser ?
La réponse à cette question dépend du fait que vous utilisez le RTK pour un positionnement haute précision et que vous vous souciez uniquement de la précision relative, ou que vous utilisez le RTK pour un enregistrement de données de haute précision globales, tel que des travaux d’étude. Dans le premier scénario, la réponse est non, tandis que dans le second scénario, la réponse est oui.
Un drone DJI Enterprise avec RTK peut-il être connecté à un service d’abonnement NTRIP tiers ?
Oui, un drone compatible DJI Enterprise RTK peut se connecter directement à un service réseau RTK pris en charge par NTRIP, tel que Topcon Topnet Live, Leica Smartnet et Trimble VRS. Cela facilite la configuration du service.
Sur un nouveau site où il n’y a pas de points connus pour configurer une station de base D-RTK2, comment pouvons-nous garantir une bonne précision des données collectées ?
Si un service NTRIP est disponible, vous pouvez vous connecter à Internet et utiliser RTK via un caster NTRIP, tant que la ligne de base (distance entre le drone et le caster NTRIP) n’est pas trop éloignée. Si Internet n’est pas une option, vous pouvez envisager d’utiliser un processus PPK pour post-traiter les données de la station de base, ainsi que les données d’image du drone, au lieu d’utiliser RTK. En savoir plus sur PPK ici.
Quels types de messages RTCM sont pris en charge par les drones compatibles DJI Enterprise RTK ?
Veuillez vous reporter au tableau suivant pour localiser les types de messages RTCM pris en charge correspondant aux modèles de drone :
|
Platforme |
Module RTK |
Service RTK pris en charge |
Type de message RTCM pris en charge par le protocole NTRIP |
|
Matrice M300 RTK Matrice M350 RTK |
Deux antennes RTK |
Réseau personnalisé RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Matrice M30 Matrice M30T |
Deux antennes RTK |
Réseau personnalisé RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Mavic 3 Enterprise Mavic 3 Thermal Mavic 3 Multispectral |
En option ; Module RTK vendu séparément |
Réseau RTK personnalisé (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Phantom 4 RTK |
Antenne RTK unique |
Réseau RTK personnalisé (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC |
|
Mavic 2 Enterprise Advanced |
En option ; Module RTK vendu séparément |
Réseau personnalisé RTK (NTRIP) |
TCM 3.0 RTCM 3.1 RTCM 3.2 |

